您现在的位置是:主页 > news > app是基于什么开发的/河北百度seo关键词排名
app是基于什么开发的/河北百度seo关键词排名
![]() admin2025/6/29 20:48:18【news】
admin2025/6/29 20:48:18【news】
简介app是基于什么开发的,河北百度seo关键词排名,东莞网站建设建网站,企业信息管理系统有哪些一、地图分类: 1.定位:指机器人在地图中确定自己的位置。需要稀疏地图即可 2.导航:机器人在地图中进行路径规划,在任意两个点寻找路径,需要稠密地图。 3.避障:更关注局部地图,仅有特征点无法…
一、地图分类:
1.定位:指机器人在地图中确定自己的位置。需要稀疏地图即可
2.导航:机器人在地图中进行路径规划,在任意两个点寻找路径,需要稠密地图。
3.避障:更关注局部地图,仅有特征点无法判断是否为障碍物,需要稠密地图。
4.重建:主要用于向人类展示,需要看上去更舒服、更美观。也可以用于通信,可以远程观看重建的三维地图,如网上购物或者三维视频通话。这种地图对外观有要求,更希望构建带纹理的平面。需要稠密地图。
5.交互: 主要是指人与地图之间的互动。如AR设备中放置虚拟物体与人交互或 语义地图中机器人识别地图中的物体。
二、单目稠密重建
单目通过三角化得到像素的距离,双目通过左右目的视差计算像素的距离,这两种方式称为立体视觉。
单目稠密重建中,通过极线搜索和块匹配技术确定某帧图像中的像素点在其他帧的位置,然后使用深度滤波确定深度值。
视觉里程计中使用三角测量计算深度的前提是特征点已经匹配好,而且位姿已知。稠密重建需要知道参考帧所有像素点的深度,由于大部分像素点都不是特征点,对于这些点通过极线搜索和快匹配方法确定在其他帧图像位置。
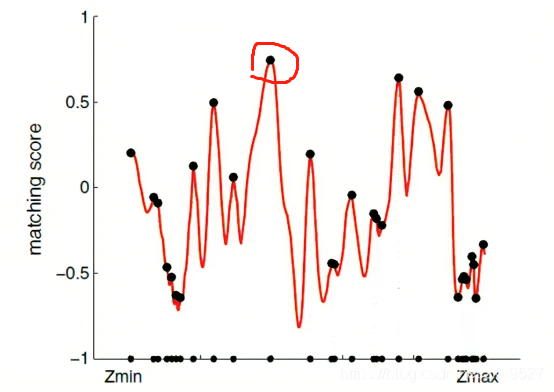
上图表示第一帧的某个像素点,在第二帧图像沿着极线匹配得分的分布。选择最高点当投影点计算深度值,但是某个像素点不可能只被观测两次,导致计算的深度值不一样。因此把深度估计建模为一个状态估计问题,使用深度滤波器方法求解。
step1:首先假设像素的深度满足高斯分布: , 其中
是第一次三角化计算的深度值
step2:新观测到的深度满足高斯分布:, 其中
是每次计算的新深度值,
表示不确定度,书中给出了具体的计算方法,深度滤波器就是不断缩小这个不确定度。
step3:使用观测的信息更新原先 的分布,融合后的均值和方差为:

但是实际的深度值不一定符合高斯分布,因此有了均匀-高斯混合分布。








