您现在的位置是:主页 > news > 做一个网站首页多少钱/公司企业网站建设
做一个网站首页多少钱/公司企业网站建设
![]() admin2025/6/8 20:11:39【news】
admin2025/6/8 20:11:39【news】
简介做一个网站首页多少钱,公司企业网站建设,百度注册入口,外包公司做网站有哪些内容本文摘自于:徐冠宇,董洪伟,钱军浩,许振雷. 基于点对特征的散乱堆放物体的位姿估计算法[J]. 激光与光电子学进展, 2020, 57(18): 181508引言现有的三维物体识别和位姿估计方法无法很好地用于散乱堆放物体的场景,尤其是有严重遮挡和混叠的场景。研究团队使用基于点对特…

本文摘自于:徐冠宇,董洪伟,钱军浩,许振雷. 基于点对特征的散乱堆放物体的位姿估计算法[J]. 激光与光电子学进展, 2020, 57(18): 181508
引言
现有的三维物体识别和位姿估计方法无法很好地用于散乱堆放物体的场景,尤其是有严重遮挡和混叠的场景。
研究团队使用基于点对特征的点云匹配和位姿估计算法,针对工业环境中乱序物体的特点,进行了一系列改进,
如场景点云法线方向一致性调整、抓取位姿筛选策略调整、旋转对称引起的角度偏差调整
,以取得更理想的位姿估计结果。
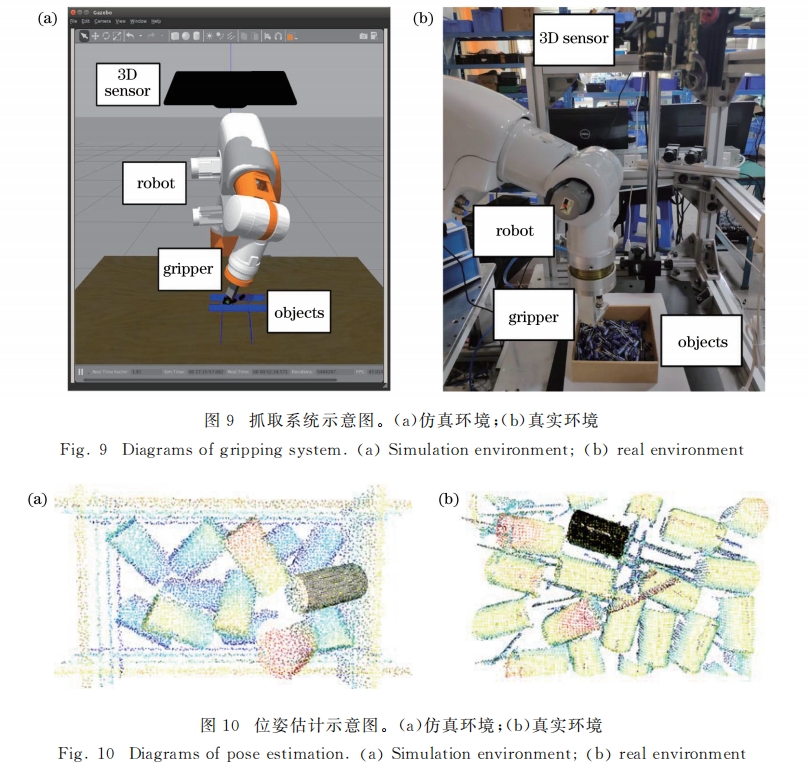
在仿真环境和真实场景下进行了一系列实验,实验结果表明,所采用的算法在乱序物体场景中的位姿估计效果比较理想。
基于点对特征的位姿估计算法
基于点对特征的位姿估计算法分为离线建模和在线识别两个阶段,如图1所示。

离线建模阶段:
使用待抓取物件的 CAD 模型,将其离散化为点云,或使用点云成像设备扫描待抓取物件获得点云, 估算点云的法线,然后从点云中提取点对特征,并将其保存在哈希表中,完成离线建模;
在线识别阶段:
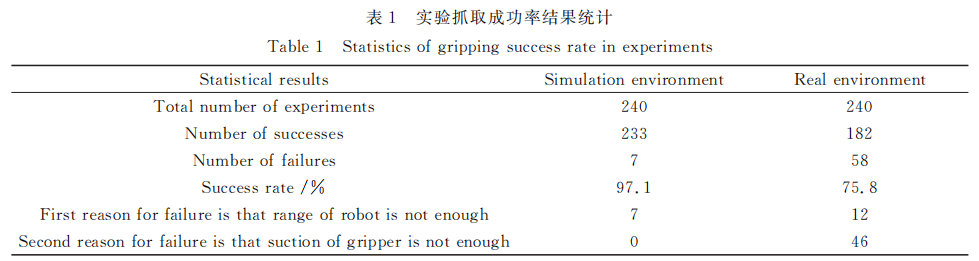
使用点云成像设备扫描散乱堆放的待抓取物件 的场景,获得场景点云,使用与离线建模阶段同样的方法获得点对特征,然后进行点对特征对齐和位姿估计,在位姿参数空间使用投票策略进行模板匹配, 对得到的多个位姿进行聚类,选择得分高的位姿作 为最终的输出位姿。
面向散乱堆放物体的优化
针对工业环境中的散乱堆放物体(如电容、转 子、火花塞等),研究团队在基于点对特征的位姿估计算法基础上,进行了一系列改进,以取得更理想的位姿估计结果。
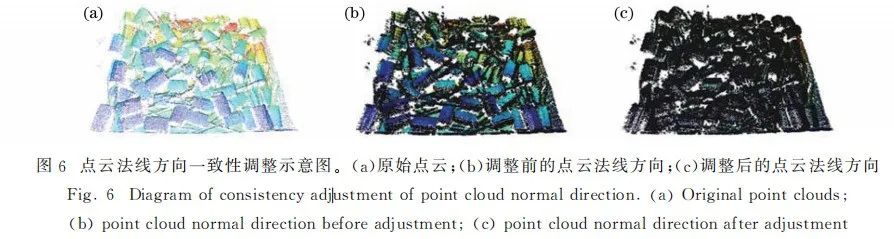
1.场景点云法线方向一致性调整
对于工业环境中的散乱堆放物体,使用点云成像设备来获取场景点云数据。由于点云成像设备在相机坐标系下的位置坐标已知,即视点vp,故只需要调整场景点云中所有点的法线,使其朝向视点vp即可。设场景点云中某一点为pi,其法向量为ni, 调整点pi 的法线方向,使其满足

2.抓取位姿筛选策略调整
基于点对特征的位姿估计算法,本质上是从场景点云中生成很多个提议位姿。为筛选出合理的抓取位姿,研究团队综合考虑重合率、倾斜、高度这三个要素。
?重合率:
使用提议位姿将模板点云变换到场景点云中时,要求模板点云中的内点比例越高越好,内点是模板点云中与场景点云的最近邻点的距离小于阈值的点。
?倾斜:一般的抓取位姿都是竖直向下的,使用提议位姿将模板点云变换到场景点云中,要求模板点云的位姿的z 轴与机械臂坐标系的z 轴夹角越小越好,否则容易出现机械臂超出行程范围等问题。
?高度:
使用提议位姿将模板点云变换到场 景点云中时,要求模板点云的位姿的z 值越大 越 好,因为对于乱序堆放物体,理应先抓上方的物体, 再抓下方的物体,以避免抓取路径遮挡的问题。
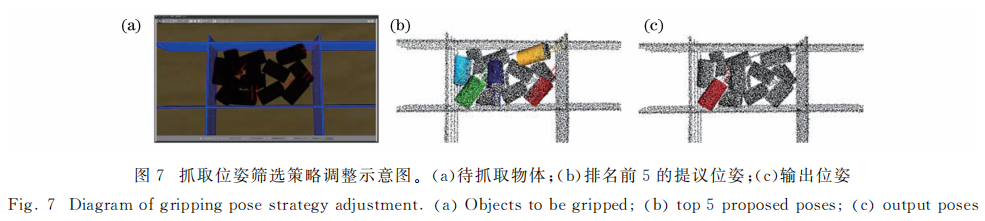
研究团队使用的抓取位姿筛选策略优先考虑重合率,再考虑倾斜,最后考虑高度,即对于所有提议位姿,先按重合率降序排序,再筛选剩下的与机械臂坐标系的z轴夹角小于30°的提议位姿,最后取提议 位姿中z 值最大的位姿,则该位姿为合理的抓取位姿。待抓取物体以及计分排名前5的提议位姿、最终输出的位姿分别如图7(a)~(c)所示。
3.旋转对称引起的角度偏差调整
一般的抓取位姿都是竖直向下的,所以比估算出的位姿更合理的情况是:将其绕物体的旋转轴旋转一定角度,使待抓取物体坐标系的z 轴与机械臂基坐标系的z 轴夹角尽可能小,以便于机械臂抓取。
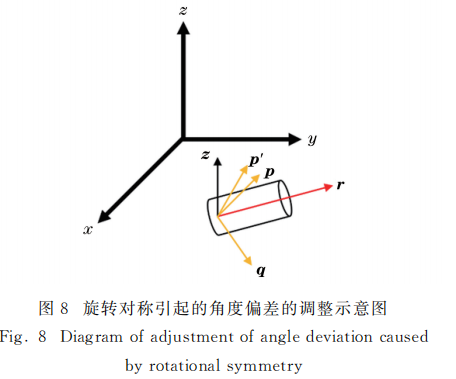
如图8所示,设z为机械臂坐标系的z 轴向量,r 表示物体的旋转轴向量,p 表示匹配出的最佳位姿的 z 轴向量,表示更合理位姿的z 轴向量,设q=z×r。显然所求的p'即为z 在p、q 所在平面上的投影。求解∠(p,p')的步骤如下。
1)由于抓取位姿竖直向下,故匹配出的最佳位 姿的z 轴垂直于旋转轴,则有p⊥r,p'⊥r。显然当 z,p,r共面时,∠(z,p)最小,抓取姿态最接近垂直方向。
2)求q=z×r,则有q⊥z,q⊥r。由于z,p,r 共面,故q⊥p',即∠(p',q)=π/2。由于q⊥r,即q 垂直于旋转轴,故有p,p',q 共面。
3)∠(p,p')= ∠(p',q)- ∠(p,q)= π/2 - arccos pq /|p||q|,进而求得p'。
试验结果与结论
在仿真环境下取得了97.1%的抓取成功率,在真实场景下取得了75.8%的抓取成功率。如果标定机械臂DH 参数后,机械臂精度足够高,且机械臂行程满足、吸盘吸力足够,则可以取得近100%的抓取成功率。实验结果表明,所提算法在散乱堆放物体场景中的位姿估计效果比较理想。
推荐阅读
【视觉】Oculus Quest VR的手部追踪技术细节
【行业】2020最具产业价值的7个AI领域:机器视觉、智能语音交互、NPL等
【视觉】先进驾驶辅助系统中基于单目视觉的场景深度估计方法
【视觉】采用空间投影的深度图像点云分割
【视觉】3D视觉技术,已经悄悄走进你的生活
【视觉】先进驾驶辅助系统中基于单目视觉的场景深度估计方法
【行业】2020年中国机器视觉发展前景分析
【视觉】煤矸智能分选的机器视觉识别方法与优化
【科普知识】神经网络发展简史:从浅层神经网络到深度学习
小姐姐为你介绍计算机视觉的5大应用
【视觉】上海交大提出少样本图像生成新方法F2GAN
【行业信息】小米“智能工厂”来了,1秒生产1台手机
【视觉知识】基于机器视觉的水果品质检测综述
【行业信息】浅谈计算机视觉技术进展及其新兴应用
【行业信息】机器视觉应用大盘点
【有点意思】发动机点火器怎么工作的?
【视觉知识】全局快门和卷帘快门有什么区别?
【视觉知识】无需模板匹配的刹车片表面缺陷图像检测方法
【视觉知识】基于机器视觉的奶牛发情行为自动识别方法
【视觉知识】TOF 3D视觉技术
【视觉知识】机器人视觉3D成像方法与特点
声明:部分图片及内容来源于网络。仅供读者学习交流之目的,如有不妥,请联系删除。

我知道你在看哟