您现在的位置是:主页 > news > 如何制作h5页面视频/seo关键词排名优化技巧
如何制作h5页面视频/seo关键词排名优化技巧
![]() admin2025/6/3 15:35:55【news】
admin2025/6/3 15:35:55【news】
简介如何制作h5页面视频,seo关键词排名优化技巧,装修公司网站怎么做的,网站建设用什么工具文章目录流程1.创建工作空间创建工作空间以及子文件夹src转入工作空间ros编译2.启动vs在工作空间启动vs3.vscode中编译ros4.创建ros工程包和添加依赖添加依赖5.编写文件c没有代码提示cpp文件py文件6.配置文件参数7.编译运行在工作区的终端配置环境变量打开一个新的终端,启动ros…
文章目录
- 流程
- 1.创建工作空间
- 创建工作空间以及子文件夹src
- 转入工作空间
- ros编译
- 2.启动vs
- 在工作空间启动vs
- 3.vscode中编译ros
- 4.创建ros工程包和添加依赖
- 添加依赖
- 5.编写文件
- c++没有代码提示
- cpp文件
- py文件
- 6.配置文件参数
- 7.编译运行
- 在工作区的终端配置环境变量
- 打开一个新的终端,启动ros核心
- 运行python文件
- 运行c++文件
流程
1.创建工作空间
创建工作空间以及子文件夹src
mkdir -p +空间名/src
转入工作空间
cd 空间名
ros编译
catkin_make

2.启动vs
在工作空间启动vs
code .

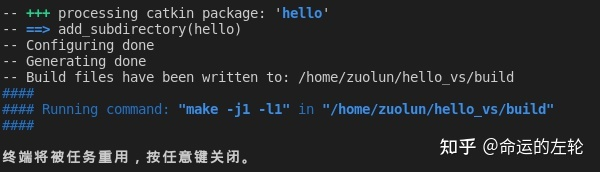
3.vscode中编译ros
选择要运行的生成任务(catkin_make bulid):
直接使用命令:Ctrl + shift + b(点击第二个的齿轮)

按下去会自动进入一个json后缀(tasks.json)的文件:
全部改成如下代码
{
// 有关 tasks.json 格式的文档,请参见// https://go.microsoft.com/fwlink/?LinkId=733558"version": "2.0.0","tasks": [{"label": "catkin_make:debug", //代表提示的描述性信息"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行"command": "catkin_make",//这个是我们需要运行的命令"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”"group": {"kind":"build","isDefault":true},"presentation": {"reveal": "always"//可选always或者silence,代表是否输出信息},"problemMatcher": "$msCompile"}]
}
也可以只改group这句,改成
"group": {"kind":"build","isDefault":true}

4.创建ros工程包和添加依赖
选定src右键–>create catkin package–>在package name 输入要创建的工程包输入之后,
添加依赖
roscpp rospy std_msgs
检查依赖是否写错
ctrl shift +B
5.编写文件
第二个src右键新建文件(cpp后缀)
c++没有代码提示
到c_cpp_properties.json找到cppStandard:和cStandard
1.cppStandard的值:改为c++17
2.cStandard的值:改为c11
py
在第二个src同级目录新建文件夹scripts,在其中添加.py后缀文件
编写完py文件之后,需要在scripts文件夹右键打开终端,更改读写权限(*.py 更改该目录下所有py后缀的文件权限
chmod +x *.py

cpp文件
/*控制台输出 HelloVSCode !!!*/
#include "ros/ros.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");//需要中文输出加这句//执行节点初始化ros::init(argc,argv,"HelloVSCode");//输出日志ROS_INFO("Hello VSCode from c");return 0;
}
py文件
#! /usr/bin/env python
"""Python 版本的 HelloVScode,执行在控制台输出 HelloVScode实现:1.导包2.初始化 ROS 节点3.日志输出 HelloWorld"""import rospy # 1.导包if __name__ == "__main__":rospy.init_node("Hello_Vscode_p") # 2.初始化 ROS 节点rospy.loginfo("Hello VScode from python") #3.日志输出
6.配置文件参数
打开第二个src目录下的MakeLists.txt文件:
C++:找到add_executable和target_link_libraries修改参数

python:找到catkin_install_python修改参数

参数的修改详细见我之前文章的链接:
python版本
python修改参数
c++版本
c++修改参数
7.编译运行
在工作区的终端配置环境变量
source ./devel/setup.bash
打开过的终端都在右边

打开一个新的终端,启动ros核心
roscore


运行python文件
rosrun 包名 .py后缀文件名
运行c++文件
rosrun 包名 映射名

成功!!!
这是我学习的视频教程,感谢赵虚左老师的讲课。
www.bilibili.com/video/BV1Ci4y1L7ZZ?p=20
如有错误,敬请指正,欢迎交流,谢谢♪(・ω・)ノ








