您现在的位置是:主页 > news > 做网站做的/建站公司哪个好
做网站做的/建站公司哪个好
![]() admin2025/5/29 23:26:13【news】
admin2025/5/29 23:26:13【news】
简介做网站做的,建站公司哪个好,娜娜视频免费视频在线,郑州网站建设rwxwl参考:https://blog.csdn.net/geerniya/article/details/90681003web说明:本文选用的是速腾16线激光雷达。iview1. 采集 pcap 文件:经过 Wireshark 抓包或速腾激光雷达的上位机软件 rsview 采集数据,获得 pcap 原始文件。svg2. ros…
参考:https://blog.csdn.net/geerniya/article/details/90681003web
说明:本文选用的是速腾16线激光雷达。iview
1. 采集 pcap 文件:
经过 Wireshark 抓包或速腾激光雷达的上位机软件 rsview 采集数据,获得 pcap 原始文件。svg
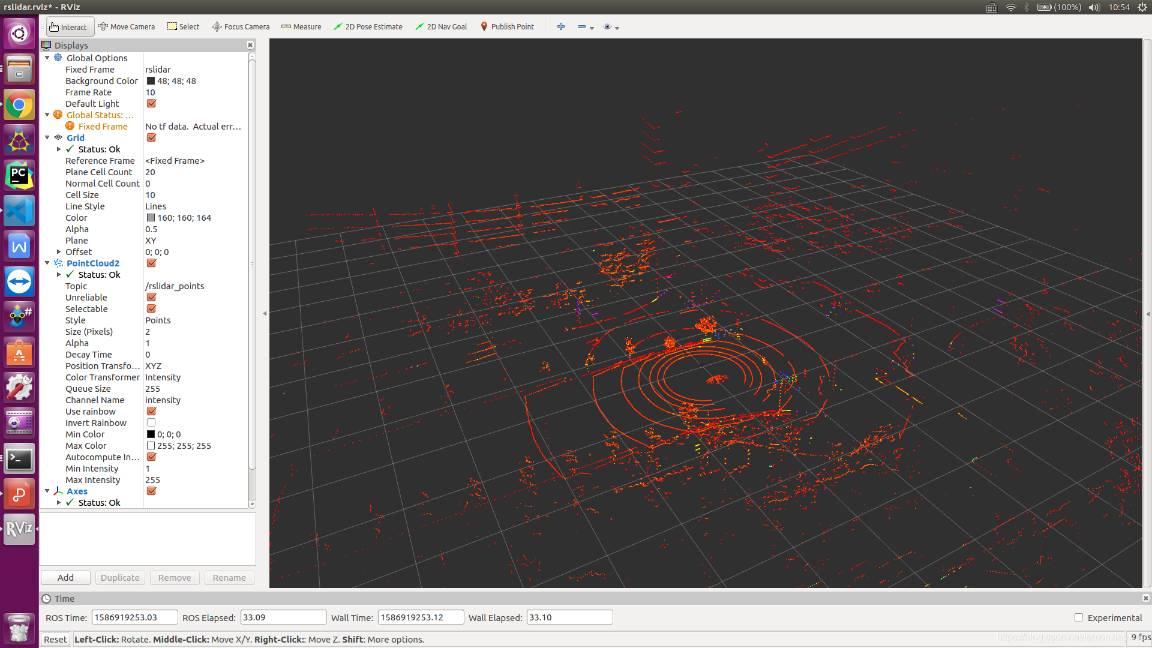
2. ros 上回放 pcap 文件:
在速腾激光雷达的 ros 驱动上,修改 ros_rslidar 中的 rs_lidar_16.launch 文件,回放 pcap ,修改内容以下:spa
//your.pcap为第一步采集到的pcap包
而后,打开一个终端,输入以下命令,回放 pcap 数据:.net
roslaunch rslidar_pointcloud rs_lidar_16.launch
即可获得以下,显示为以前采集到的动态点云图:
 code
code
3. 录制bag包:
此时,第二步中的终端不要关闭。咱们采用 rosbag 命令录制须要的 bag 包。orm
rosbag record -o mybag.bag /rslidar_points
这里咱们只获取了 /rsliar_points 话题的数据,固然还能够获取更多的话题或者全部的话题数据,具体可查询 rosbag record 相关的命令。xml
4. 将 bag 文件转换成 pcd 文件:
到这一步时能够将以前打开的终端所有关了。接下来说上一步获取的 mybag.bag 转换成 pcd 文件。
新建一个终端,键入以下命令:blog
rosrun pcl_ros bag_to_pcd mybag.bag /rsliar_points ~/pcd_file
这里咱们经过 pcl_ros 包将 bag 文件中的 /rslidar_points 话题的数据生成对应的 pcd 文件。默认 pcl_ros 是安装的,若是提示缺乏的话,请根据提示自行安装。token
5. 查看 pcd 文件:
关闭全部终端。
上一步中获取的 pcd 文件是不少个,每个 pcd 是一帧数据,命名方式与点云数据的时间戳有关。能够经过 pcl_viewer 命令查看 pcd 格式的文件:
pcl_viewer yourname.pcd //键入对应的pcd文件名便可
pcl_viewer 语法:pcl_viewer .pcd
选项是:
-bc r,g,b =背景颜色
-fc r,g,b =前景色
-ps X =点大小(1…64)
-opaque X =渲染点云不透明度(0…1)
-ax n =启用XYZ轴的屏幕显示并将其缩放到n
-ax_pos X,Y,Z =若是启用轴,则在空间中设置其X,Y,Z位置(默认为0,0,0)
-cam( * )=使用给定的摄像机设置做为初始视图;
( * )[剪切范围/焦点/位置/视图上限/距离/窗口大小/窗口位置]或使用包含相同信息的。
-multiview 0/1 =启用/禁用自动多视口渲染(默认禁用)
-normals 0 / X =禁用/启用每一个第X点的曲面法线显示为线(默认为禁用)
-normals_scale X =将正常单位矢量大小调整为X(默认值为0.02)
-pc 0 / X =禁用/启用每一个X点的主曲率显示为线(默认禁用)
-pc_scale X =将主曲率向量大小调整为X(默认值为0.02)
(注意:对于多个.pcd文件,提供多个 - {fc,ps}参数;它们将自动分配给正确的文件)








