您现在的位置是:主页 > news > 哪些网站的数据库做的好/百度网盘资源免费搜索引擎入口
哪些网站的数据库做的好/百度网盘资源免费搜索引擎入口
![]() admin2025/5/13 21:46:23【news】
admin2025/5/13 21:46:23【news】
简介哪些网站的数据库做的好,百度网盘资源免费搜索引擎入口,太原做企业网站,wordpress打不开页面结构如下:底盘1舵机,伸展2舵机,手爪1舵机。 思路是:1.通过摄像头获取小球坐标,2.计算底盘舵机旋转角度,底盘舵机旋转到位,3.计算控制距离的两个舵机角度,伸展到位,4.抓球…
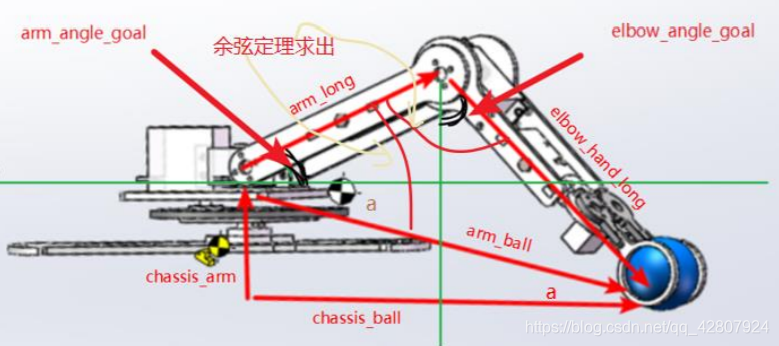
哪些网站的数据库做的好,百度网盘资源免费搜索引擎入口,太原做企业网站,wordpress打不开页面结构如下:底盘1舵机,伸展2舵机,手爪1舵机。
思路是:1.通过摄像头获取小球坐标,2.计算底盘舵机旋转角度,底盘舵机旋转到位,3.计算控制距离的两个舵机角度,伸展到位,4.抓球…
结构如下:底盘1舵机,伸展2舵机,手爪1舵机。
思路是:1.通过摄像头获取小球坐标,2.计算底盘舵机旋转角度,底盘舵机旋转到位,3.计算控制距离的两个舵机角度,伸展到位,4.抓球。
# 舵机控制示例。
#
# 这个例子演示了舵机扩展板。请按照以下步骤操作:
#
# 1. 连接舵机到任何PWM输出。
# 2. 将3.7v电池(或5V电源)连接到VIN和GND。
# 3. 将pca9685.py和servo.py复制到OpenMV并重置。
# 4. 在IDE中连接并运行此脚本。import sensor, image, time, mathfrom servo import Servos
from machine import I2C, Pinred_threshold = ( 45, 83, 20, 57, -10, 60)sensor.reset() # 初始化摄像头
sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565.
sensor.set_framesize(sensor.QQVGA) # 使用 QQVGA 速度快一些
sensor.skip_frames(time = 2000) # 跳过2000s,使新设置生效,并自动调节白平衡
sensor.skip_frames(10) # Let new settings take affect.sensor.set_auto_gain(False) # 关闭自动自动增益。默认开启的,在颜色识别中,一定要关闭白平衡。
sensor.set_auto_whitebal(False)
#关闭白平衡。白平衡是默认开启的,在颜色识别中,一定要关闭白平衡。
clock = time.clock() # 追踪帧率i2c = I2C(sda=Pin('P5'), scl=Pin('P4'))
servo = Servos(i2c, address=0x40, freq=50, min_us=650, max_us=2800, degrees=180)K=5000#the value should be measured得到mm
x_chassis=0
y_chassis=0
x_camera=0
l_camera=0
i=0
arm_angle_goal=0
elbow_angle_goal=0
chassised_angle=0
chassised_angle_goal=0
chassis_angle_goal=0
arm_ball=0
chassis_ball=0
chassis_high=0
chassis_angle=0 #底盘舵机角度
arm_angle=0 #臂舵机角度
elbow_angle=0 #肘舵机角度
hand_angle=0 #手爪舵机角度max_chassis_angle=180 #底盘舵机复位角度
min_chassis_angle=0 #底盘舵机有效角度
max_arm_angle=93 #臂舵机复位角度
min_arm_angle=0 #臂舵机有效角度
max_elbow_angle=180 #肘舵机复位角度
min_elbow_angle=0 #肘舵机有效角度
max_hand_angle=120 #手爪舵复位机角度
min_hand_angle=60 #手爪舵机有效角度x_camera=0 #小球对于摄像头x坐标
y_camera=0 #小球对于摄像头y坐标
x_chassis=0 #小球对于底盘x坐标
y_chassis=0 #小球对于底盘y坐标
i=0arm_angle_camera=0 #手臂和水平线角度
arm_ball=0 #臂舵机到球距离
elbow_angle_camera=0 #肘舵机于竖线的角度chassis_high=70 #底座高度mm 90-20=70
arm_long=130 #手臂长度
elbow_hand_long=165 #手爪到肘长
chassis_ball=0 #底座到球距离while(True):time.sleep(3000)print('进入')while(i<11):i=i+1clock.tick() # Track elapsed milliseconds between snapshots().img = sensor.snapshot() # 从感光芯片获得一张图像blobs = img.find_blobs([red_threshold])if blobs:#如果找到了目标颜色for b in blobs:#迭代找到的目标颜色区域# Draw a rect around the blob.img.draw_rectangle(b[0:4]) # rect#用矩形标记出目标颜色区域img.draw_cross(b[5], b[6]) # cx, cy#在目标颜色区域的中心画十字形标记Lm = b[2]#+b[3])/2length = K/Lm #球到摄像头距离x_camera=x_camera+b[5] #为了求x点在感兴趣区域的坐标x平均l_camera=l_camera+length #距离累加10次print('正在获取小球对于球的坐标,距离,x坐标:',length,int(length),b[5])#print(length)#print(b[5])time.sleep(30)x_camera=x_camera/10l_camera=l_camera/10x_chassis=math.sin((x_camera-80)*115/160)*l_camerax_chassis=math.fabs(x_chassis)y_chassis=math.cos((x_camera-80)*115/160)*l_camera+80#115是整个视野角度,平均到x方向每个像素就是115/160左边为负,右边为正,再乘以距离就是真实的偏移距离print('得到数据,距离平均值mm,x坐标平均值,x绝对坐标,y绝对坐标,角度')time.sleep(30)print(l_camera)print(x_camera)print(x_chassis)print(y_chassis)print((x_camera-80)*115/160)#break#进入抓球状态chassised_angle=math.atan(x_chassis/y_chassis) #得到相对弧度chassised_angle=chassised_angle*180/3.14 #转换成角度chassised_angle_goal=90-chassised_angle/0.34 #0.34=50/17 转换成舵机绝对角度print('底盘绝对角度是:')print( chassised_angle)#arm_angle_goal和elbow_angle_goal是目标角度chassis_ball=math.sqrt(x_chassis**2+y_chassis**2)arm_angle_goal=math.atan(chassis_high/chassis_ball) #角度:底座——球 & ——水平线arm_ball=math.sqrt(chassis_ball*chassis_ball+chassis_high*chassis_high) #臂舵机到球距离#手臂和水平线角度余弦定理c*c = a*a + b*b - 2*a*b*cosC求反余弦减去臂舵机到球距离print( chassised_angle)arm_angle_goal=math.acos((arm_long**2 + arm_ball**2 - elbow_hand_long**2)/(2*arm_long*arm_ball))-arm_angle_goalarm_angle_goal= arm_angle_goal*180/math.pi #手臂和水平线角度elbow_angle_goal = math.acos((elbow_hand_long*elbow_hand_long + arm_long*arm_long - arm_ball*arm_ball )/(2 * elbow_hand_long * arm_long))*180/math.pi#臂肘之间的角度elbow_angle_goal = elbow_angle_goal-90+arm_angle_goal #肘舵机于竖线的角度print('底座目标角度:')print(chassised_angle)print('手臂目标角度:')print(arm_angle_goal)print('肘部目标角度:')print(elbow_angle_goal)passwhile(elbow_angle!=elbow_angle_goal or arm_angle!= arm_angle_goal or chassis_angle!= chassis_angle_goal or hand_angle!=min_hand_angle ):i=4while(i>=0):i=i-1if i==3 and hand_angle>min_hand_angle:servo.position(i,hand_angle)hand_angle-=1elif i==2 and elbow_angle <= elbow_angle_goal:passservo.position(i,elbow_angle)elbow_angle+=1elif i==1 and arm_angle <= arm_angle_goal:passservo.position(i,arm_angle)arm_angle+=1elif i==0 and chassis_angle > chassis_angle_goal:ervo.position(i,chassis_angle)arm_angle-=1elif i==0 and chassis_angle <= chassis_angle_goal:servo.position(i,chassis_angle)arm_angle+=1while(min_hand_angle<=hand_angle):hand_angle+=1servo.position(4,hand_angle)time.sleep(30)while(elbow_angle!=max_elbow_angle or arm_angle!=max_arm_angle or chassis_angle!=90):passi=3while(i>=0):#底座,手臂,肘,手爪,对应0,1,2,3i=i-1if i==2 and elbow_angle<=max_elbow_angle:servo.position(i,elbow_angle)elbow_angle+=1elif i==1 and arm_angle<=max_arm_angle:servo.position(i,arm_angle)arm_angle+=1elif i==0 and chassis_angle!=90:if chassis_angle<90:ervo.position(i,chassis_angle)arm_angle+=1else:ervo.position(i,chassis_angle)arm_angle-=1








